司各庄镇机械品步进式DS070L1-10-19-70非标齿轮减速机
文章来源:ymcdkj
发布时间:2024-04-27 14:28:54
-70非标齿轮减速机
什么是过功率保护?答:除了额定功率之外,还有一个数据,叫过载保护,英文叫OPP。过载保护指电源的负载持续上升,达到某个点了,电源就自动断电,以免出现过流损坏电源或者电脑的其他部件。OPP值通常是额定功率的1.3倍左右,有些厂商把OPP设得太高,其实是不安全的。在额定功率和OPP之间,会有一个区间,比如,新冷钻额定功率3W,OPP为37W,那么,3-37W之间的这个区域就是一个盲区。
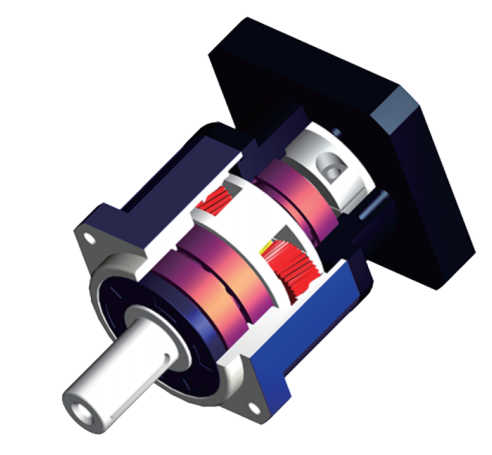
行星齿轮减速机传动的主要特点如下
1、运动平稳、抗冲击和振动的能力较强 由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同轴减速机同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
2、传动比较大,可以实现运动的与 只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮减速机传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的与以及实现各种变速的复杂的运动。
为了使行星轮间载荷分布均匀,有多种多样的均载方法。对于主要靠机械的方法来实现均载的系统,其结构类型可分为两种:
1、静定系统
该系统的均载原理是通过系统中附加的自由度来实现均载的。
2、静不定系统
均载机构:
1、基本构件浮动的均载机构
(1) 中心轮a浮动 (2)内齿轮b浮动 (3)转臂H浮动 (4)中心轮a与转臂H同时浮动 (5)中心轮a与内齿轮b同时浮动 (6)组成静定结构的浮动
2、杠杆联动均载机构
本次所设计行星齿轮是静定系统,基本构件中心轮a浮动的均载机构。
其实各位都忽略了一个问题,就是伺服电机都是同步电机,其转子转速就是电机的实际转速,不存在速度差,而变频器控制对象是异步电机,其实际转速跟转子转速存在着转差,所以它本身电机在速度就不是很稳定。
伺服的基本概念是准确、、快速。变频仅仅是伺服控制的一个必须的内部环节,伺服驱动器中同样存在变频(要进行无级调速)。但伺服将电流环速度环或者位置环都闭合进行控制,这是很大的区别。除此外,伺服电机的构造与普通电机是有区别的,要满足快速响应和准确。同步伺服的 格及其昂贵,这样在现场应用允许的情况下多采用交流异步伺服,这时很多驱动器就是 变频器,带编码器反馈闭环控制。所谓伺服就是要满足准确、、快速,所以往往只有 的产品才采用伺服系统。
+ -500-S2
-500-S2